400-700-9998
最新产品










最新方案





新闻资讯
18
2022.08
Spot的自主冒险——RTK厘米级惯性导航系统
随着移动机器人技术越来越先进,自主导航应用越来越普遍,对精确导航解决方案的需求也在不断增长。无论是引···
09
2021.06
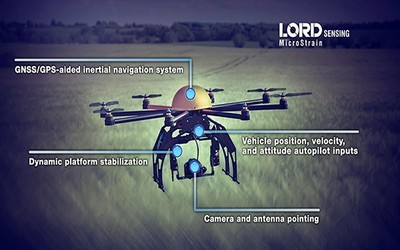
解决无人机重量难题——MicroStrain微型惯导系统、惯性传感器
随着无人机技术的发展,无人机的使用领域渐渐的从传统的军用领域慢慢的普及到工业领域和消费类电子产品领域···
08
2021.06
从室内定位看惯性导航-惯性传感器
惯性导航技术所用到的传感器包括陀螺仪,加速度计,有时还包括磁力计,气压计等。其应用集中于紧急救援或者···
08
2021.06
详解一下技术水平先进性的重要标志IMU-惯性姿态传感器
惯性技术已经成为一国技术水平先进性的重要标志之一,其先进程度和应用水平关系到国家多个行业的信息化水平···